Abbildung 5: Der moderne Steuermann: Die Mikroelektronik an Bord braucht den Schutz eines wasserdichten Gehäuses.
Bei der Microtransat starten autonome, unbemannte Mini-Segelboote, die bei Wind und Wetter selbstständig Kurs halten müssen. In der rauen See vor der Küste von Wales fand die letzte Generalprobe vor der im nächsten Jahr anstehenden Atlantiküberquerung statt.
Windstärken zwischen fünf und sechs und hohe Wellen empfingen die Teilnehmer vor der Küste von Aberystwyth in Wales (Abbildung 2) zur ersten Prüfung, einer kurzen Regatta. Die schwierigste Aufgabe der Microtransat 2007 aber war die 24-Stunden-Wettfahrt nach vorgegebenem Kurs auf offener See.

Abbildung 1: Da geht’s hin! Bei der Microtransat galt es, in einem 24-Stunden-Rennen ein Ziel anzusteuern.
Prüfung bestanden
Das mit einem Linux-System ausgestattete ASV Roboat der Österreichischen Gesellschaft für innovative Computerwissenschaften (Innoc) hat im Jahr 2007 bei der Microtransat [1] den Sieg errungen. Schon 2006 belegte die Innoc beim Wettbewerb Platz eins, damals noch mit einem kleineren Boot. Sukzessive hat sich bei der Microtransat (Abbildung 1) die Schwierigkeit gesteigert. Im nächsten Jahr schickt der Wettbewerb die Boote allein über den Atlantik. Das Innoc-Team hat sich darauf vorbereitet.
Das Roboat [2], das sie 2007 ins Rennen schickten, entspricht der Bootsklasse Laerling, ist 3,75 Meter lang und 1,35 breit, hat einen Tiefgang von 0,55 Metern, 140 Kilogramm Verdrängung und kann bis zu 3 Quadratmeter Segelfläche aufziehen (Abbildung 3). 60 Kilo Bleiballast sorgen für Stabilität und richten das Boot wieder auf, sollte es kentern. 400 Liter Schaumauftrieb machen es unsinkbar. Eine automatische Lenzpumpe hilft zusätzlich den Kahn wieder flott zu machen. Die beim kleineren Vorjahresboot verwendeten Algorithmen zur Steuerung erwiesen sich als problemlos skalierbar.

Abbildung 2: Das Roboat auf Kurs vor der walisischen Küste.

Abbildung 3: Stapellauf nach der Ankunft im Hafen von Aberystwyth.
Tag und Nacht auf See
Mit am Start waren die University of Wales in Aberystwyth [3], die französische Ecole Nationale Supérieure d\’Ingénieurs de Constructions Aéronautiques aus Toulouse [2] und die Queens University, Ontario [4]. “Die Konkurrenz war um einiges stärker als bei der Microtransat 2006 in Frankreich”, sagte Roland Stelzer, Präsident der Innoc und Projektleiter Roboat. Aber technische Probleme gab es auch 2007: Das Iboat-Team der Ingenieursschule Ensica aus Frankreich hatte mit dem GPS-Signal Schwierigkeiten, die Universität Wales musste nach 18 Stunden Fahrt aufgeben, die Kanadier waren mit dem Vorjahresboot angereist, das sich als zu klein erwies und zudem Stromversorgungsprobleme hatte.
Das einzige Boot, das die 24 Stunden schaffte, war das aus Österreich. Ein Eingreifen des Teams, das den Kurs von Land (Abbildung 4) und anfangs von einem Segelboot aus beobachtete, war nicht nötig. Dem Roboat kam nur der irgendwann abflauende Wind in die Quere. Es sei schwierig gewesen, gegen die Gezeitenströmung anzusteuern, erzählt Teammitglied Karim Jafarmadar.

Abbildung 4: Segelcrew an Land: Das Roboat-Team kontrolliert die Fahrt des Mini-Seglers am Laptop und mit dem Feldstecher.
Zieleingabe genügt
Das ASV vor Roboat steht für “Autonomous Sailing Vessel”. Es genügt, die Zielkoordinaten einzugeben, damit die optimale Route anhand von Wetterdaten in Echtzeit berechnet und ständig unter Berücksichtigung der Abdrift korrigiert wird. Algorithmen analysieren die Sensordaten und berechnen Ruder- und Segelstellung. Wende und Halse beherrscht das Segelboot selbstständig.
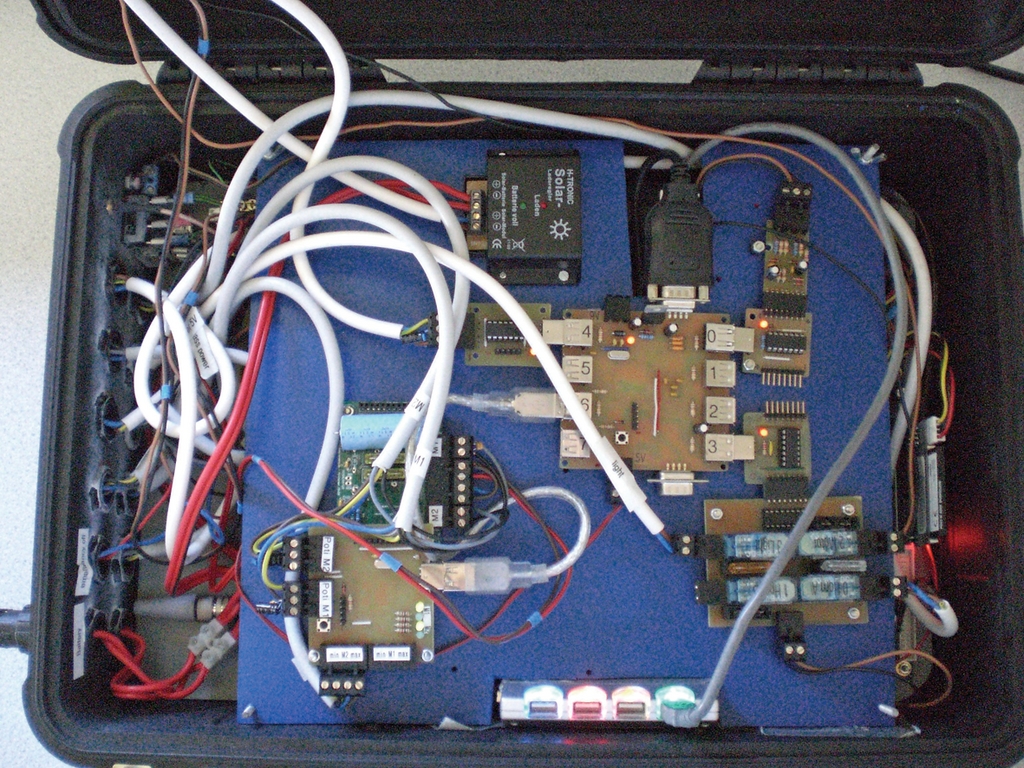
Möglich macht dies eine ausgeklügelte Steuerung (Abbildung 5). Der Master, das Großhirn des Bootes, besteht aus einem Mini-ITX-Board von Via (EPIA M-II 6000E) mit 600-MHz-Prozessor. Er läuft unter Debian Sarge. Das Innoc-Team hat eigene Software beigesteuert, die in Java, C++ und Perl geschrieben ist. Wie bei Robotern üblich sind Sensoren die Schlüssel für die Datenverarbeitung.
Abbildung 5: Der moderne Steuermann: Die Mikroelektronik an Bord braucht den Schutz eines wasserdichten Gehäuses.
Sensoren und Aktuatoren
Das Roboat hat Messinstrumente an Bord, die Position und Geschwindigkeit per GPS, Spannungsversorgung, Stromverbrauch, Baumstellung, Wind, Richtung und Krängung messen. Jeder Sensor hat einen eigenen Mikrocontroller, der die vom Sensor empfangenen Daten bereits vorverarbeitet, berichtet Karim Jafarmadar. Die Kommunikation zwischen Mikroprozessor und Linux-System erfolgt über eine Eigenentwicklung, Simple Sensor Network (SSN) genannt. Die Spezifikation des Protokolls und die Software selbst sind frei verfügbar. Ein in Java geschriebener Prozess, der Abstraktor, nimmt die Daten unter Linux entgegen, bildet wenn nötig Mittelwerte und rechnet Einheiten um.
Die Steuerungs-Software besteht aus vier Layern mit unterschiedlichen Teilaufgaben, das Routing, die Manöverausführung und die Reaktion auf Notfälle zählen dazu. Die Layer nehmen Berechnungen vor, die sich an den Sensorwerten und den strategischen Vorgaben orientieren und geben ihre so ermittelte Strategie für einen Teilsaspekt weiter.
Über eine definierte TCP-Schnittstelle können die einzelnen Layer der Roboat-Steuerungs-Software auf diese Sensorwerte zugreifen und die Antriebe für Segel und Ruder, Aktuatoren genannt, ansteuern. Bei den mechanischen Antrieben setzt Innoc beim Kettenantrieb für die Segel auf eine Eigenkonstruktion, der Linearantrieb für die Ruder stammt vom Hersteller Transmotek.
Zwei Langzeitentladebatterien und ein Solarpanel mit Laderegler spenden die Energie für das Boot. Die Kommunikation erfolgt via WLAN, UMTS/GPRS und Inmarsat-Satellitenkommunikation.
Über den Atlantik
Wenn es im Jahr 2008 von Portugal aus über den Atlantik gehen soll, sind die Teilnehmer noch mehr gefordert. Insbesondere die autarke Energieversorgung ist ein Problem. Beim Roboat etwa wird das Solarsegel für eine Fahrt, die vier oder fünf Wochen dauert, nicht ausreichen, erklärt Karim Jafarmadar. Die Devise lautet: Strom sparen. Windkraft und ein Schleppgenerator sind weitere Ansätze, um das System am Leben zu halten. Außerdem muss die Hardware dem Salzwasser dauerhaft widerstehen können. Die Diskussion über die Transatlantikfahrt hat bereits begonnen.
|
Infos |
|---|
|
[1] Microtransat: [http://www.microtransat.org] [2] Innoc: [http://www.roboat.at] [3] Team der University of Walesin Aberystwyth: [http://www.aber.ac.uk/en/visitor/index.php] [4] Französisches Team:[http://www.ensica.fr/microtransat/] [5] Kanadisches Team:[http://engsoc.queensu.ca/sailboat/] |





