
© Alle Fotos: Nils Faerber
Ende April ließ das Unternehmen Aldebaran Robotics auf seinen Developer Days den 57 Zentimeter großen humanoiden Roboter Nao aufs menschliche Publikum los, mehrheitlich Open-Source-Entwickler. Sie überschütteten den mit 25 Freiheitsgraden und Kinderblick ausgestatteten Autonomen mit Sympathie.
Den größten Erfolg haben Projekte, hinter denen Menschen stehen, die mit Herz und Seele dabei sind – und was könnte eine größere Motivation sein, als einen Kindheitstraum Realität werden zu lassen? Bruno Maisonnier, ehemaliger Finanzmanager einiger französischer Firmen, setzte seinen in die Tat um. 2005 kehrte er der Finanzwirtschaft den Rücken und begann, in einer eigenen Firma ([1], siehe Kasten “Aldebaran Robotics”) humanoide Roboter zu entwickeln. In naher Zukunft sollen sie unsere Haushalte bereichern.
Aldebaran Robotics
Der Markt für humanoide Roboter ist winzig und für direkt profitorientierte Unternehmen bis heute nicht lukrativ. Es muss schon den Gründern von Aldebaran-Robotics klar gewesen sein, dass dies kein in Kürze profitables Abenteuer sein würde, sondern eine Investition in eine deutlich spätere Zukunft.
Private Investoren
Und so setzt Aldebaran nicht auf Risikokapitalgeber, sondern auf private Investoren, allen voran Bruno Maisonnier selbst, aber auch auf staatliche Forschungsförderung. Der dadurch wesentlich geringere kommerzielle Druck gibt dem Unternehmen und seinen Entwicklern mehr Spielraum und Handlungsfreiheit – was auch deutlich an dem hohen Grad der Motivation und der Freude an ihrer Arbeit bei jedem Entwickler zu spüren ist, etwa auf der Developer-Konferenz 2012.
Aktuell sind weltweit um die 2000 Nao-Roboter im Einsatz. Der wohl bekannteste Einsatzort ist der Robo-Cup [2], für den Nao heute die offizielle Plattform in der Klasse der humanoiden Roboter ist. Ein weiterer großer Bereich sind Forschung und Entwicklung sowohl an Universitäten als auch in Firmen. Der dritte, für Aldebaran sehr wichtige Markt sind die privaten Enthusiasten.
Das so genannte Developer Program [3] fördert Aldebaran mit einem stark vergünstigten Preis für einen Nao.
Das Linux-Magazin war bei den Nao Developer Days [4] in Paris zu Gast und konnte mit den Mitarbeitern von Aldebaran und einigen Teilnehmern des Developer Program sprechen.
Einer der Hauptentwickler von Aldebaran, Jerome Monceaux, erklärt, Bruno Maisonnier habe bereits bei der Gründung von Aldebaran die Vision verkündet, dass humanoide Roboter mehr seien, als nur dienstbereite Maschinen. Allein durch ihr humanoides Äußeres verändere fast jeder Mensch sofort sein Verhalten gegenüber dem Roboter.
Diese Argumentation scheint nachvollziehbar: Die Nerds und Programmierer auf dem Developer-Treffen konnten ihre kindliche Begeisterung nicht verbergen.
Unvermeidbar menschlich
Die Anmutung dieser speziellen Maschine verleitet sofort dazu, das Gerät zu vermenschlichen. Jedermann beginnt mit dem Kasten zu reden, ob er will oder nicht. Selbst hartgesottene Entwickler behandeln ihn wie ein Kind. Und wenn er dann auch noch zu sprechen beginnt, brechen endgültig alle Dämme.
Dies mag auf Anhieb etwas übertrieben und sinnlos erscheinen, hat aber in der Praxis sehr sinnvolle Auswirkungen, weil der Ansatz, die Technik dem Menschen anzupassen und nicht umgekehrt, so noch besser funktioniert. In unserer Gesellschaft haben wir uns allzu häufig daran gewöhnt, dass viele technischen Dinge auf uns fremde, fast schon magische Art funktionieren und wir uns dem fügen müssen, weil die Technik das eben so und nicht anders vorgibt.
Und Hand aufs Herz, welcher Science-Fiction-Fan hatte nach “Star Wars” nicht den Traum, auch einen C3PO oder R2D2 zu Hause zu haben oder später dann einen kleinen freundlichen Kumpel wie Wall-E [5] oder Nummer 5 [6]? Mit dem Nao macht Aldebaran das erstmals in Ansätzen möglich.
Jetzt kommt Nao
Nao (englisch ausgesprochen “Now!”) ist der erste Schritt in Richtung eines universell einsetzbaren humanoiden Roboters. Er ist sicherlich noch lange nicht perfekt, auch weil viele der nötigen Technologien noch gar nicht entwickelt sind. Aber gerade als Basis für deren Entwicklung ist der kleine Androide hilfreich. Geht es nach dem Hersteller, dann soll Nao eine universelle Entwicklungsplattform für möglichst viele Forschungsbereiche der humanoiden Robotik werden.
Vor allem die Hardware (siehe Tabelle 1, [7]) ist knifflig: Praktisch jedes Teil der mit 25 Freiheitsgraden sehr komplexen Mechanik muss individuell angefertigt werden, selbst die Motoren jedes einzelnen Antriebs sind Spezialentwicklungen für Nao. Einen Roboter auf zwei Beinen laufen zu lassen und seine knapp 6 Kilo dabei korrekt und vor allem schnell auszubalancieren, ist nicht zuletzt auch eine mechanische Herausforderung (Abbildung 2).
Tabelle 1
Hardware
| CPUs | 1.6-GHz-Intel-Atom-CPU im Kopf, ARM-CPU im Rumpf (zur Steuerung und Kommunikation mit den Antrieben und Sensoren) |
| RAM | 1 GByte |
| Netzwerk | WLAN 802.11a/b/g, 10/100-MBit-Ethernet |
| Festplatte | 4-GByte-SD-Karte für Software |
| Akku | Lithium-Polymer-Akkupack mit 27,6 Wattstunden, für ca. 1 bis 1,5 Stunden Betrieb |
| Audio | 4 Mikrofone am Kopf zur Ortung von Geräuschen, 2 Lautsprecher links und rechts am Kopf |
| Video | 2 1,3-Megapixel-Kameras (eine geradeaus, eine zum Boden gerichtet) |
| Sensoren | 2 Ultraschall-Entfernungssensoren zur Hinderniserkennung (15 bis 70 cm), 3 Berührungssensoren pro Hand, 3 Berührungssensoren am Kopf, 8 Drucksensoren pro Fuß, Gyroskop und Beschleunigungssensoren im Rumpf, Consumer-Infrarot-Sender und -Empfänger (CIR) in den “Augen” |
| Gelenke | 25 mit Antrieb (entspricht 25 Freiheitsgraden) |
| LEDs | farbige LEDs um Augen, Ohren, am Kopf und an den Füßen |
| Größe | 57 cm (stehend) |
| Gewicht | 5,7 kg |
| Preis | ab 15000 Euro für Endkunden, 3600 Euro für die Teilnehmer des Aldebaran-Developer-Programms |
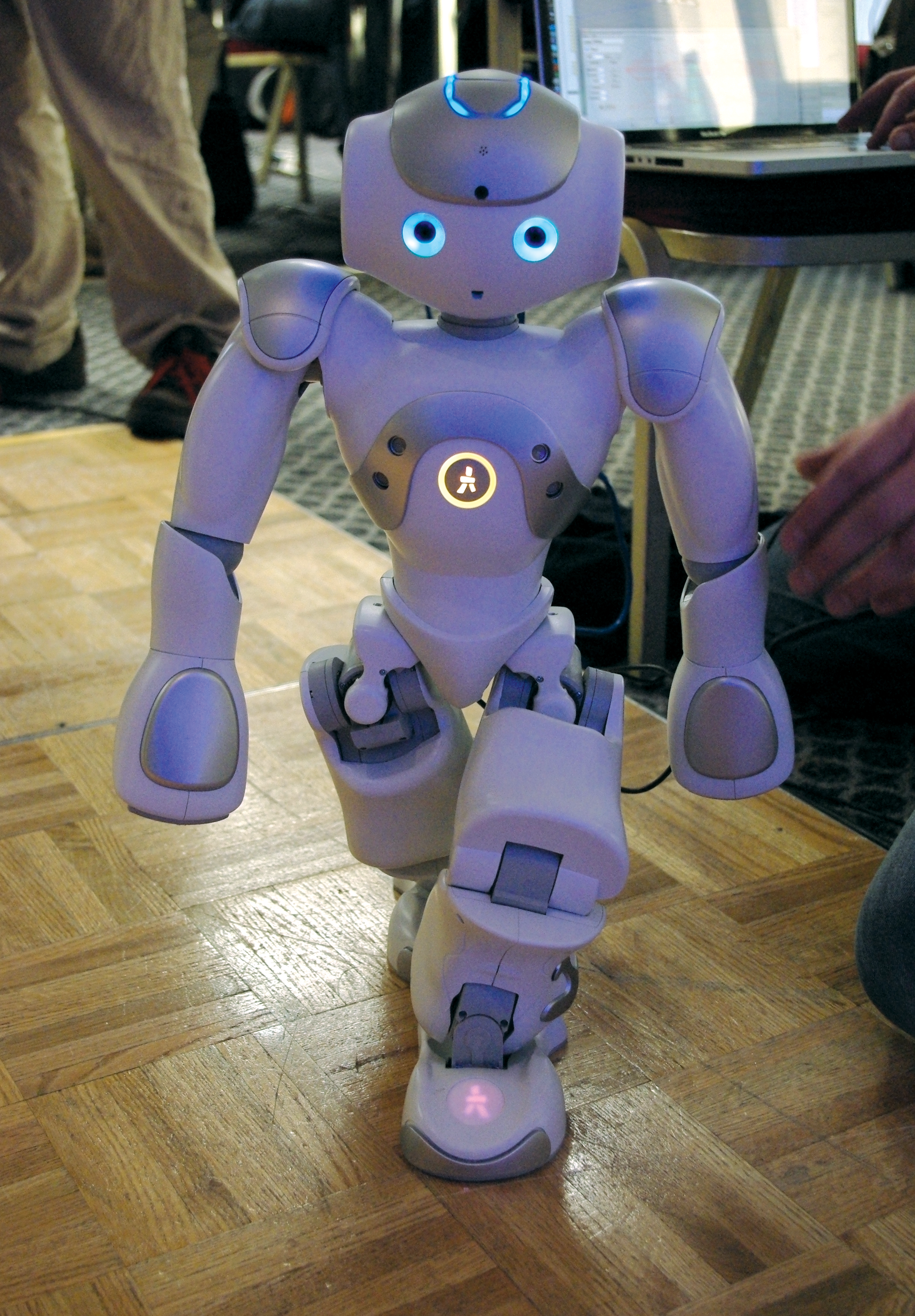
Abbildung 2: Leichter gesagt als getan: Schon das Laufen stellt Mechanik und Software vor eine schwierige Aufgabe.
Seine Höhe von 57 Zentimetern (Abbildung 3) sei ein Kompromiss, erklärt Jerome Monceaux. Mit der Größe nimmt auch das Gewicht rasant zu, die kinetische Energie steigt mit jedem Kilo, das in Bewegung gelangt. Je schwerer der Roboter, umso größer die Gefahr für ihn und seine Umgebung, wenn er stürzt.

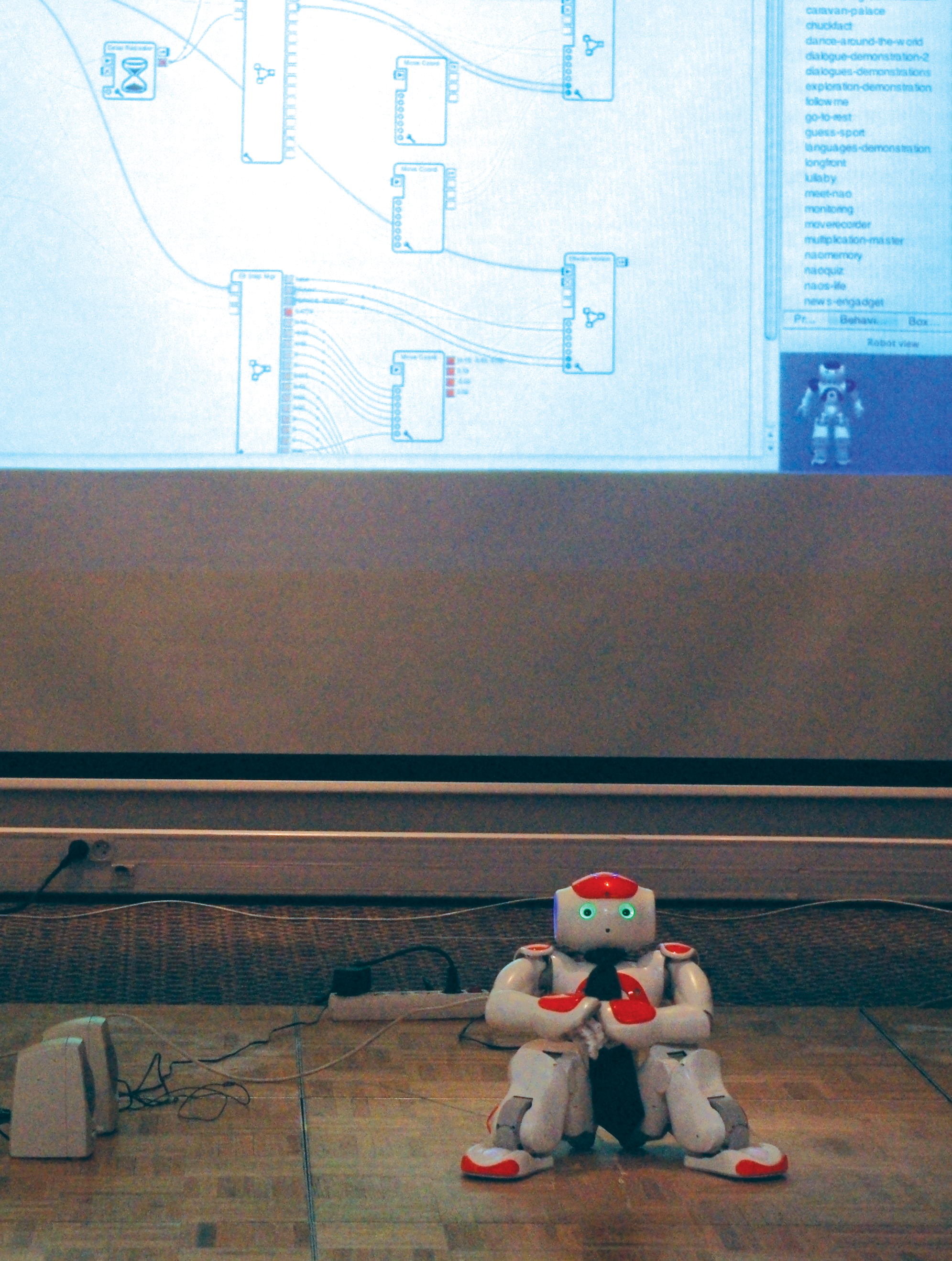
Abbildung 3: 57 Zentimeter, 5,7 Kilogramm – der Nao-Roboter spricht eindeutig Kindchenschema-Reflexe an, auch bei Entwicklern.
5,7 Kilogramm Linux
Fällt Nao vornüber, bleibt der mögliche Schaden noch überschaubar, auch weil der Kleine blitzschnell schützend die Hände nach oben reißt. Bei einem Roboter von gut 1,40 Meter Größe – dem nächsten großen Ziel von Aldebaran mit dem Codenamen “Romeo” – kommt ein Gewicht von mindestens 50 Kilogramm zusammen, das mit Leichtigkeit ein Haustier töten oder einen Menschen schwer verletzen kann.
Kein Roboter ohne Steuercomputer, kein Computer ohne Software – die Programme, die Nao antreiben, basieren überwiegend auf Linux. Im Kopf des Kleinen stecken eine Intel-Atom-CPU mit 1,6 GHz sowie 1 GByte RAM, von einer 4 GByte großen SD-Karte startet Gentoo. Dieses Betriebssystem ist so erstaunlich normal, das selbst eine SSH-Verbindung mit Login bis zur Rootshell out of the Box möglich ist.
Das Herz: Nao Qi
Das Herz des Laufzeitsystems hört auf den Namen Nao Qi und ist zuständig für alle höheren Aufgaben wie die USB-Kommunikation der zweiten CPU mit einem ARM-Prozessor im Korpus. Nao Qi ist generisch und modular angelegt und soll als universelle, vernetzte Basis auch für andere Applikationen dienen.
Die Idee dahinter ist, Entwicklern für Anwendungen, die nicht direkt auf einem Nao-Roboter laufen, die gleichen APIs und Schnittstellen bereitzustellen wie auf dem Roboter selbst. Ein einfaches Beispiel hierfür wäre eine Fernsteuerungsapp, die auf Mobiltelefonen implementiert ist und direkt das Nao-Qi-API verwendet, um einen per Netzwerk angebundenen Nao zu steuern. Weil Aldebaran Robotics die Verbreitung und Verwendung von Nao Qi fördern will, beabsichtigt der Hersteller, das API in naher Zukunft schrittweise als Open Source zu veröffentlichen.
Simple Choreographie
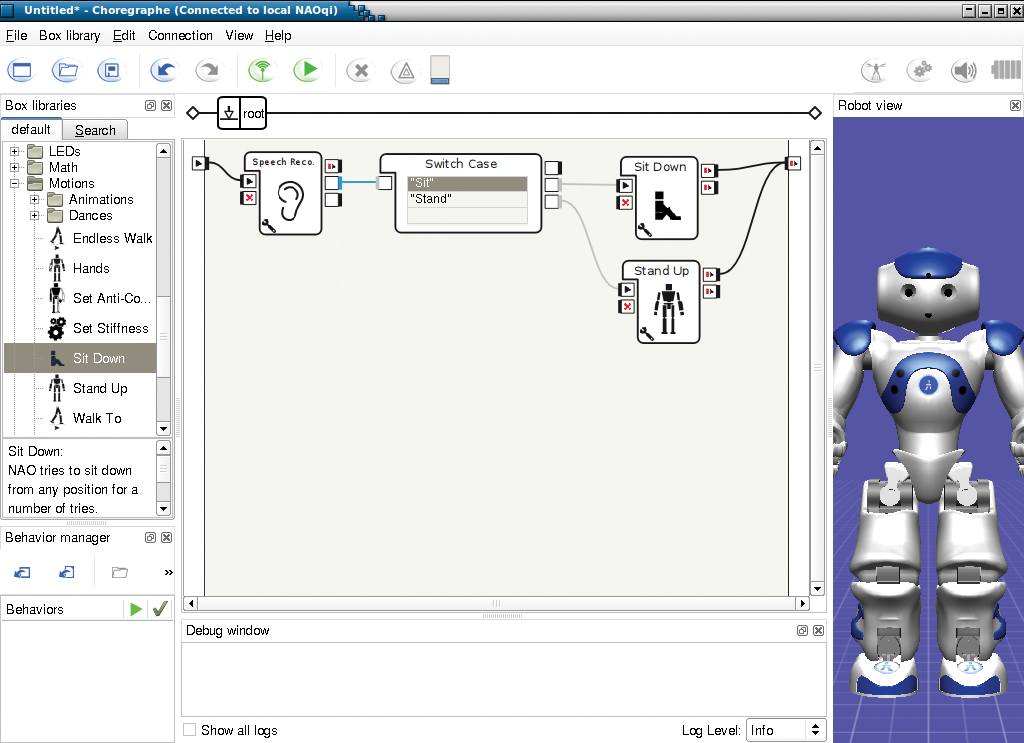
Noch weitaus interessanter als Nao Qi selbst ist die Entwicklungsumgebung für dessen API. In der zentralen Komponente, der für Windows, Mac OS X und Linux verfügbaren Applikation Choreograph, entwickeln Programmierer das so genannte Behaviour (Verhalten). Die Programmierung beginnt mit einer Aneinanderreihung von grafischen Kästen, jeweils mit einem Eingang, dem Start-Trigger, und einem Ausgang, dem Ende-Trigger.
Diese Objekte verbindet der Entwickler nacheinander oder parallel innerhalb der Choreograph-Oberfläche und bestimmt so den Ablauf eines Verhaltens nach seinen Vorstellungen. Jeder Kasten kann dabei eine einzelne Aktion sein, zum Beispiel die Bewegung eines Gelenks oder das Schalten der LEDs, oder wiederum selbst eine komplexe Abfolge von Kästen in sich vereinen. Damit lassen sich auch komplexe Abläufe – kontrolliert durch Flusssteuerungskästen – vergleichsweise einfach grafisch aufbauen. Hilfreich dabei ist auch, dass Choreograph bereits einige Dutzend vorgefertigte Typen mitbringt. Die reichliche Auswahl dieser Module ermöglicht es auch Menschen ohne Programmiererfahrung, Nao schnell etwas beizubringen – bis hierher ist keine Zeile Code nötig.
Der Screenshot von Abbildung 4 demonstriert einfaches Verhalten mit Hilfe der integrierten Sprach-Worterkennung und zweier vordefinierter Bewegungsboxen: Bei dem Sprachbefehl “Sit” soll Nao sich setzen, bei “Stand” wieder aufstehen. Ist das Verhalten fertig, überträgt ein Tastendruck es via Netzwerk auf den Nao. Choreograph kann dazu eine 3-D-Darstellung des Roboters einblenden, die Bewegung kontrollieren und die Stellungssensoren der Antriebe abfragen.
Kompliziertere Bewegungen
Für ganze Bewegungsabläufe findet sich in der Software eine Animationsbox mit passendem Editor. Der Programmierer kann dabei Naos Antriebe abschalten, alle Gelenke frei bewegen und den Roboter so in eine gewünschte Pose bringen. Hat er dabei eine Zwischenstellung erreicht, speichert er einen so genannten Key-Frame, also den Ist-Wert aller Aktor-Stellungen. Mehrere Posen nacheinander legt der Entwickler so fest und verbindet sie zu einer Animation. Die Zwischenstufen von einem Key-Frame zum nächsten berechnet die Software automatisch. Komplexe Abläufe, etwa das Aufstehen und Hinsetzen, lassen sich so sehr einfach einstudieren.
Wem dies noch nicht genügt, der taucht eine Ebene tiefer. Ein Doppelklick auf eine Box öffnet die Ansicht auf ihren Inhalt. Dies können wieder Boxen sein oder auch Programmcode. Choreograph unterstützt Python und öffnet ein Codefragment mit vorgefertigten Rümpfen der notwendigen Funktionen im eingebauten Code-Editor (Abbildung 5). Von hier aus erfolgt der Zugriff auf das umfangreiche Nao-Qi-API, also auf alle Sensoren, Aktoren und höheren Funktionen wie Ein- und Ausgabe von Sprache, Bilderkennung oder das Netzwerk.
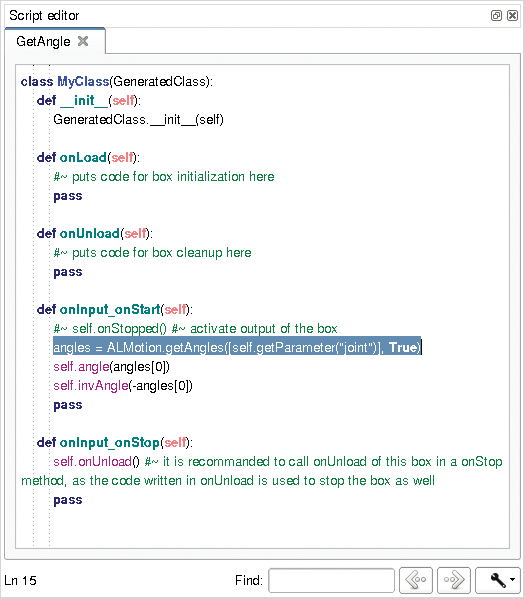
Abbildung 5: In Choreograph integriert sind auch ein Editor für Python-Code sowie eine Sensoren-Abfragebox.
Für einige Applikationen reicht Python nicht aus, gerade wenn es darum geht, schnelle, komplexe Berechnungen auszuführen, zum Beispiel zur Verarbeitung von Bildern oder Audiodaten (Abbildung 6). Hier bietet Aldebaran ein natives Cross-SDK mit dem gesamten Nao-Qi-API in C++ an. Darüber lassen sich Module implementieren, die dann wiederum via Python und Choreograph zur Verfügung stehen. Das native SDK bietet der Hersteller auch für Linux an.
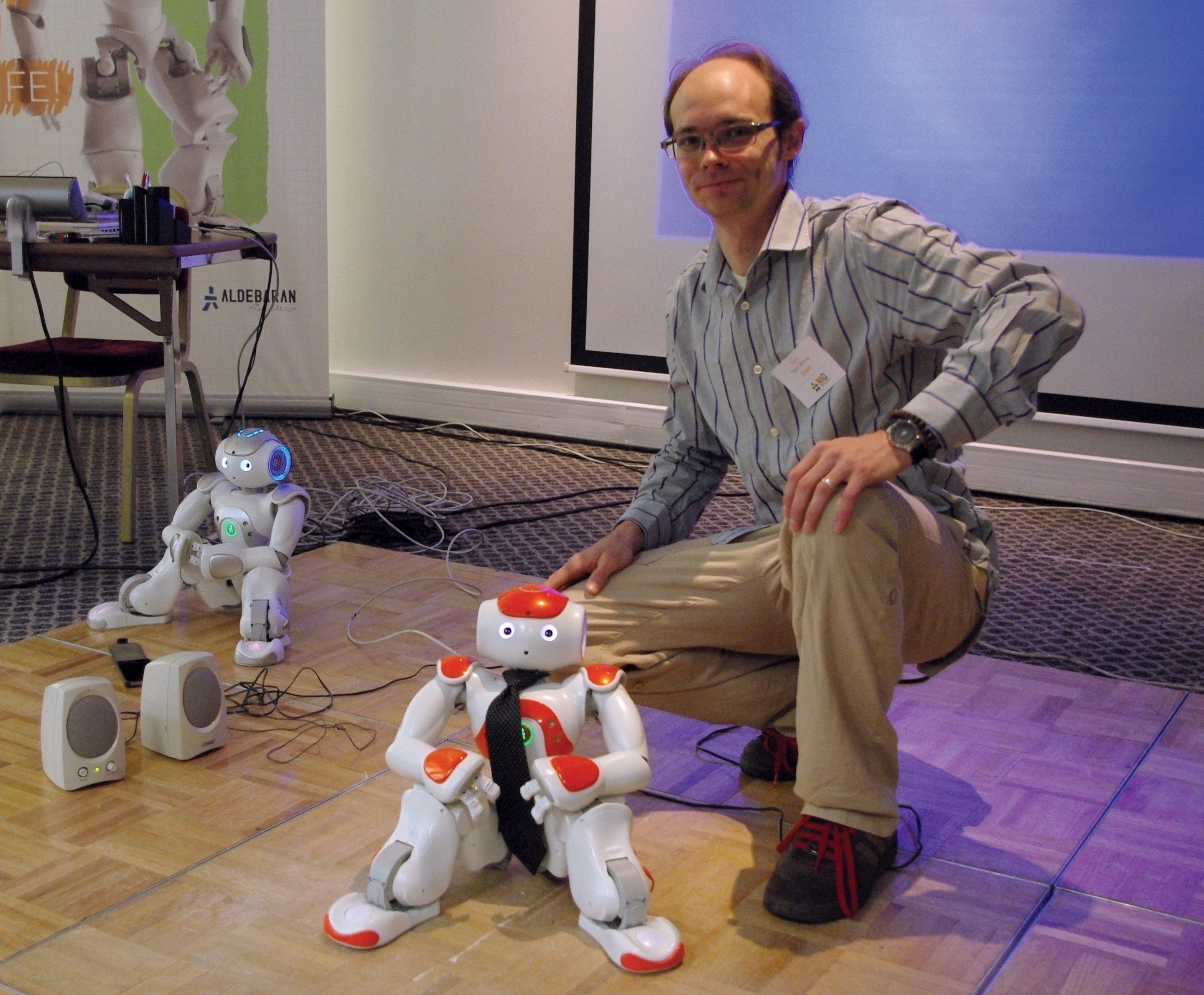
Abbildung 6: Entwickler Taylor Veltrop führt seine App vor, die Nao dazu bringt, rhythmisch zu Musik zu tanzen, sobald er sie hört.
Teures Spielzeug mit Kindchencharme
Der Nao ist allerdings ein verflixt teures Spielzeug: Mit seinem regulären Preis von gut 15000 Euro landet er wohl nur unter den wenigsten Weihnachtsbäumen. Wer das Glück hat, ins Developer-Programm aufgenommen zu werden, kann einen Nao gesponsert bekommen, muss aber immer noch gut 3600 Euro berappen.
Doch liegt der Wert von Nao ja nicht nur darin, dass er tolle Antriebe, exzellente Lautsprecher oder ein besonders tolles Design hat. Auch die Software ist nicht das, was den besonderen Reiz ausmacht. Die Faszination, die von Nao ausgeht, ist die Kombination aus Hightech und einer Verpackung, die viel mehr Menschen einen Zugang dazu finden lässt. Wenn der kleine Kerl in der Küche um die Ecke wackelt, sehen selbst Nerds nicht zuerst einen Computer. Dazu kommt die einfache Software-Entwicklung über Choreograph, mit der sich spielerisch neue Verhalten programmieren lassen.
Wer besitzt am Ende wen?
Ein britischer Teilnehmer beschrieb dies auf der Konferenz treffend mit Humor: “Zuerst besitzt du die Maschine, dann besitzt sie dich.” Daheim angekommen gestaltete er sogar sein Haus robotergerecht um! Nao verspricht eben mehr als die Erfüllung eines Kindheitstraums. Der kleine Roboter fasziniert, weil er irgendwie ein Linux-Computer ist, aber auch wieder nicht – ohne Monitor und Tastatur, dafür aber mit Augen und Ohren und der Fähigkeit, sich in der realen Welt zu bewegen.
Ebenfalls zu überzeugen weiß die umfangreiche und gut gemachte Software, die einen einfachen Zugang in die Welt der Robotik bietet. Aldebaran hat das Ziel, in absehbarer Zeit Roboter wie Nao erschwinglich zu gestalten – zu wünschen wäre es, denn der Kleine macht einfach Riesenspaß. (mfe)


Infos
- Aldebaran Robotics: http://www.aldebaran-robotics.com
- Robo-Cup: http://www.robocup.org
- Nao Developer Program: http://www.aldebaran-robotics.com/en/Solutions/For-Development/developer-program.html
- Bericht von den Nao Developer Days: http://singularityhub.com/2012/04/30/nao-robot-impresses-with-new-abilities-at-paris-conference/
- Wall-E: http://www.disney.de/wall-e/
- Nummer Fünf lebt: http://www.imdb.de/title/tt0091949/
- Die Nao-Platform: http://www.aldebaran-robotics.com/en/Discover-Nao/Key-Features/hardware-platform.html
Der Autor

Linux-Magazin-Autor Nils Faerber reiste im April 2012 zu den Aldebaran Nao Developer Days in Paris. Er ist seit 1998 freier Autor mit den Schwerpunktthemen Embedded und Mobile Linux, die er auch mit seiner Firma Kernel-Concepts bearbeitet.







suche einen Hilfsroboter zwecks Senioren-Hilfe!