Holger Buss, Ingo Busker und einige Bastler erregten Aufmerksamkeit mit ihren selbstgebauten Mini-Hubschraubern. Mittels Kamera am Fluggerät und Cyberbrille auf der Nase kreisten einige Glückliche sogar um sich selbst .
Die mit ARM-9-CPU ausgestatteten Mini-Hubschrauber entstanden Ende 2006 als Hobby von Holger Buss und Ingo Busker, die beruflich mit eingebetteten Systemen und Regelungstechnik arbeiten – allerdings nicht mit Linux. Dass die Mikrokopter auch eine linuxfähige Client-Software mitbringen, ist dem Bausatzkäufer Manuel Schrape zu verdanken: Nach dem Fertigstellen seines Hubschraubers Mitte 2008 implementierte er die “Groundstation” kurzerhand mit Qt und C++ für Linux, weil er Windows-only “doof” fand, wie er sagt.
Mit der Software, in der GPL-Linuxversion von Schrape, “QMK Groundstation”; (Qt Mikrokopter) getauft, konfiguriert der Pilot seinen Mikrokopter zum Beispiel hinsichtlich Reaktionsschnelligkeit. Als neuestes Feature kann sie Karten laden – etwa Openstreetmap – auf denen der Hubschrauber mittels Wegpunkten definierte Routen abfliegt. Weiter zeigt das Programm die Koordinaten des Flugobjekts an, seinen Akkuzustand oder seine Geschwindigkeit. Die Übertragung zwischen Hubschrauber und PC erfolgt via Bluetooth. Für die Kommunikation haben Buss und Busker eigene Protokolle geschrieben, die auf der Projektseite nach ihren Angaben frei zur Verfügung stehen.
2007 verkauften sie die ersten unbestückten Leiterkarten für rund 100 Euro. Die Bauteile mussten sich die ersten Fans noch selbst aus den Elektronikkatalogen zusammensammeln, ebenso die Rahmenteile wie Propeller, Motoren und Akku. So geht das nicht, dachten sich die in Ostfriesland ansässigen technischen Informatiker, und bieten seit etwa Mitte 2008 Komplettsätze an.
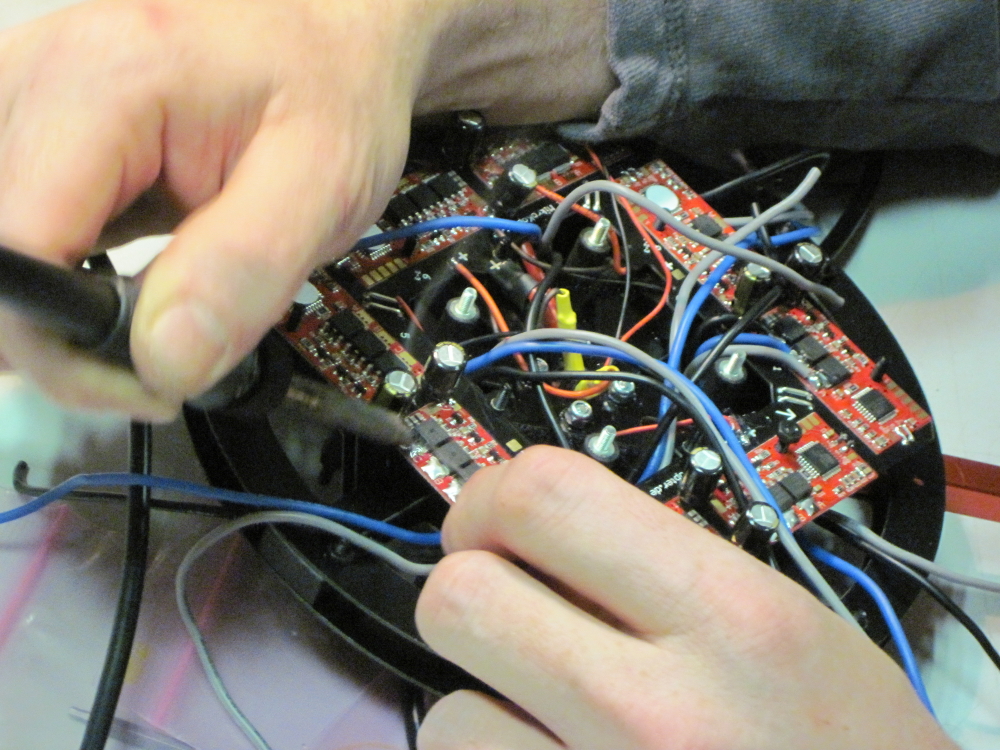
Die Bausätze und Erweiterungsteile sind heute mit vier bis acht Armen erhältlich. Jedem Rotor kommt ein eigener Controller zu. Sie sitzen im Kreis auf den einer Stromverteiler-Leiterkarte, die als Rahmen fungiert und in dessen Zentrum ein kleines dreistöckiges Platinengebäude sitzt. Das Erdgeschoss enthält Sensoren etwa für Beschleunigung, Lage und Luftdruck. Darüber sitzt die CPU-Karte und auf dem Dach ein GPS-Chip (realisiert als Abdeckung aus Leiterkartenmaterial). Ein laut Holger Buss “vernünftiges” vier-Propeller-System, also mit mindestens 20 Minuten Flugzeit und einer Tragkraft von um die 350 Gramm, kostet rund 900 Euro.
An der Unterseite seines Mikrokopters kann der erfolgreiche Bastler Digitalkameras befestigen. Er kann auch Erfrischungen vom Kühlschrank zum Pool befördern. Eine kleine Colaflasche ist für den Mikrokopter jedenfalls kein Problem. Die Lösung des frisch gebackenen Elektrotechnikstudenten Jannis Tiemann – eine Videokamera am Flieger, die ihre Bilder an ein Head-mounted Display überträgt und dem am Boden Gebliebenen die Perspektive des Hubschrauber vor Augen führt – manipulierte den einen oder anderen Ausprobierer auf dem Kongress schließlich dahingehend, dass er ob des beglückenden seltenen Anblicks hinterher für zehn Minuten das Grinsen nicht aus dem Gesicht bekam.
-

- An dem vierarmigen Mikrokopter von Jannis Tiemann weist das weiße Licht die Blickrichtung der Kamera. Auch gut zu erkennen ist der oben befestigte GPS-Chip, darunter zwei Platinen für die CPU und die Sensorlogik.

-

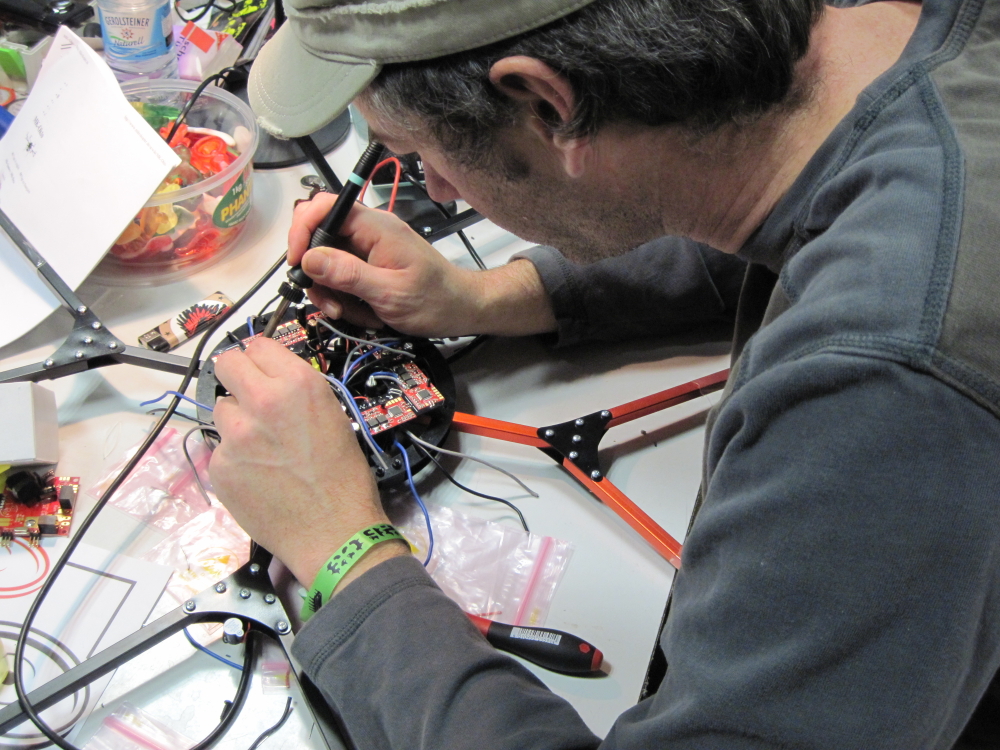
- … aber erst ist Löten angesagt. Die Mikrokopter gibt es nur als Bausatz.
-

- Jedes Flugblatt hat eine eigene Steuerungsplatine, von denen der Bastler hier gerade eine montiert.
-

- Ein schöner Anbilck …

-

- Holger Buss (links) entwarf vor rund drei Jahren zusammen mit Ingo Busker den Mikrokopter. Jannis Tiemann (rechts) zieht seinem Helikopter eine Kamera und sich selbst am liebsten dazu eine Cyberbrille an.

-

- Vor dem Kongressgebäude zogen die LED-versehenen Mini-Helikopter vor allem im Dunkeln Blicke an.




