Bei der derzeit in Portugal stattfindenden World Robotic Sailing Championship hat nach zwei Wettbewerben das österreichische Linux-Boot die Führung übernommen .
Bei Windstärke fünf trennte sich bei der Weltmeisterschaft der unbemannten und autonomen Segelbooten die Spreu vom Weizen. Die kleineren Boote waren – bauartbedingt – bei diesen Bedingungen chancenlos. Das anfangs vor dem ASV Roboat in Führung liegende Boot der ETH Zürich musste wegen eines technischen Defekts aufgeben- ein Schäkel hatte sich gelöst. Technische Schwierigkeiten dünnten das Feld im Lauf der Regatta weiter aus, nur das Roboat kam schließlich ins Ziel. Das Boot der Universität von Porto schaffte bis knapp davor, die Software streikte.
Beim zweiten Start sorgte der stärker werdende Wind für ein reduziertes Teilnehmerfeld. Die Boote “Avalon” (Schweiz) und “FAST” (Portugal) traten zwar an, gaben dann aber auf. Das Roboat der Österreichischen Gesellschaft für innovative Computerwissenschaften siegte damit zum zweiten Mal. Insgesamt starten acht Boote bei der World Robotic Sailing Championship. Am heutigen Donnerstag sind zwei weitere Wettbewerbe. Das österreichische Team führt online ein WM-Tagebuch.
-

- Das Roboat beim Schlepp zum Start. Quelle: InnoC

-
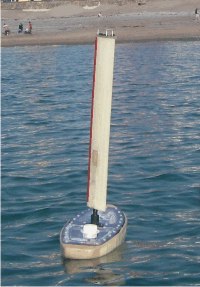
- BeagleB , die University of Aberystwyth ist mit zwei booten am Start. Quelle: WRSC, UK

-

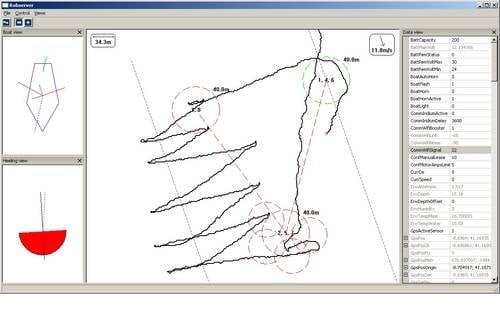
- Simulator für das Software-Tuning. Quelle: InnoC
-

- FASt, Boot der University of Porto, Portugal. Quelle: WRSC

-

- Das Iboa des Institut Supérieur de l’Aéronautique et de l’Espace, Frankreich. Quelle: WRSC

-

- MOOP, Boot der University of Aberystwyth. Quelle: WRSC
-

- Luce Canon der United States Naval Academy, Maryland, US. Quelle: WRSC

-

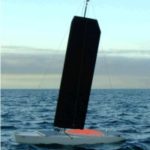
- SSA – Students Sail Autonomously – das Boot der ETH Zürich. Quelle: WRSC

-

- Um die Boje. Quelle: InnoC

-

- Starker Wind in Portugal. Quelle InnoC




